October 8, 2013 weblog
Boston Dynamics: Atlas shows balance; WildCat sprints untethered (w/ Video)
(Phys.org) —Boston Dynamics, the Waltham, Massachusetts robotics company that receives funds from the Defense Advanced Research Projects Agency (DARPA), is making more video news. Whether the company turns out videos of intros and updates of robots such as BigDog, or Petman, or Cheetah, its animal- and human-inspired robots promptly make the rounds of dozens of news sites and blogs. The company has made these robots interesting works in progress, as we see them, from development phase to phase, advancing in balance, agility, speed and strength. This month's video hits from Boston Dynamics show the company's two tests, for its bipedal Atlas and its quadruped WildCat.
Atlas is part of the DARPA Robotics Challenge Program. The robot is tethered, powered from an off-board, electric power supply. Atlas' reason for being is to serve as a humanoid robot that will be capable enough to move in outdoor, rough terrain. The limbs need to perform well, to be able to lift, carry and manipulate in rough environments. Atlas was unveiled in July at the company, as a robot that can respond to dangerous emergencies.
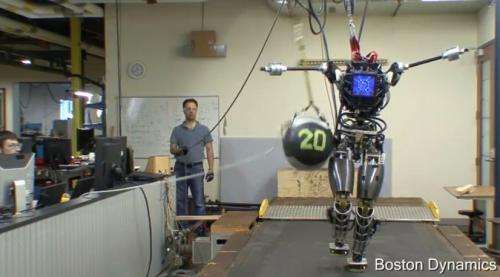
The video shows the Atlas robot now on rough terrain walking with bent knees and arms stretched, on rubble and rocks, maintaining its balance as it moves along. In another scene, a ball is trying to knock it over as Atlas stands on one foot, maintaining its balance even while standing on one leg and being hit by the ball from the side.
The feat is a tribute to the company's control system for the robot. The demo shows how Atlas can stay upright using kinematic and load data from its sensors. Commenting on his reaction to seeing Atlas stay balanced despite being hit by the ball, Noel Sharkey, professor of artificial intelligence and robotics at the University of Sheffield, told the BBC it was "an astonishing achievement" and "remarkable feat." Next on the engineering agenda is to give Atlas an articulated head with stereo cameras and a laser range finder, along with sensate hands capable of using tools.
This month, Boston Dynamics also posted a video of its WildCat robot, funded by DARPA and developed for emergency response and aid scenarios, in a public outing beyond and free from indoor treadmills. The big news about WildCat is that, unlike its robotic cousin Cheetah, this quadruped is untethered. Cheetah drew attention for its speed; the robot could run at 28 miles per hour but that was on a treadmill indoors tethered to a power supply. WildCat can sprint and gallop unrestrained at 16 miles per hour outside of the lab. The video shows its capabilities.
The company's history dates back to when it was a spinoff from the Massachusetts Institute of Technology, where Marc Raibert and colleagues developed animal-inspired robots. They founded the company in 1992.
More information: www.bostondynamics.com/index.html
© 2013 Phys.org





















